Canny 边缘检测是当今最流行的边缘检测方法之一,因为它非常强大和灵活。该算法本身遵循从图像中提取边缘的三个阶段过程。
边缘检测是一种图像处理技术,用于识别对象的边界(边缘)或图像内的区域。边缘是与图像相关的最重要的特征之一。我们通过图像的边缘了解图像的底层结构。因此,计算机视觉处理管道在应用中广泛使用边缘检测技术。

用于边缘检测的图片
import cv2
img = cv2.imread('test.jpg')
cv2.imshow('Original', img)
cv2.waitKey(0)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img_blur = cv2.GaussianBlur(img_gray, (3,3), 0)第一步是读入图像,使用imread()函数来读取我们需要进行检测的图片,并进行图片的灰度颜色空间转换,因为我们不需要颜色信息来检测边缘,这里转换到灰度空间方便图片的边缘检测,读取图像后,我们还使用GaussianBlur()函数对其进行模糊处理。
GaussianBlur()为了减少图像中的噪声。在边缘检测中,必须计算像素强度的数值导数,这通常会导致“噪声”边缘。换句话说,图像中相邻像素(尤其是靠近边缘)的强度可能会波动很大,从而产生不代表我们正在寻找的主要边缘结构的边缘。 模糊可以平滑边缘附近的强度变化,从而更容易识别图像中的主要边缘结构。
用于边缘检测的图
Sobel 边缘检测
Sobel 边缘检测是最广泛使用的边缘检测算法之一。Sobel 算子检测以像素强度突然变化为标志的边缘,如下图所示。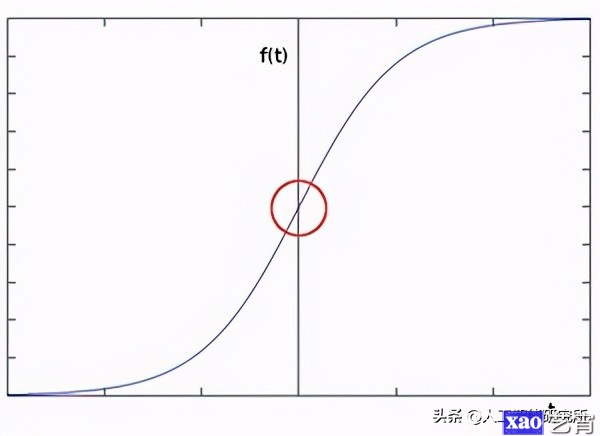
作为 t 函数的像素强度
当我们绘制强度函数的一阶导数时,强度的上升更加明显。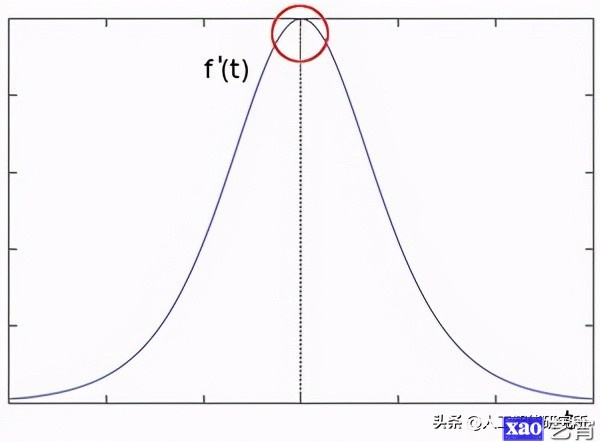
作为 t 函数的像素强度的一阶导数
上图表明可以在梯度高于特定阈值的区域中检测到边缘。此外,导数的突然变化也会揭示像素强度的变化。考虑到这一点,我们可以使用 3×3 内核来近似导数。我们使用一个内核来检测 X 方向上像素强度的突然变化,以及 Y 方向上的另一个。
这些是用于 Sobel 边缘检测的内核: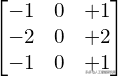
X 方向内核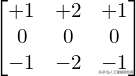
Y 方向内核
当这些内核与原始图像卷积时,便会得到一个“Sobel 边缘图像”
# X轴方向的Sobel 边缘检测
sobelx = cv2.Sobel(src=img_blur, ddepth=cv2.CV_64F, dx=1, dy=0, ksize=5)
# Y轴方向的Sobel 边缘检测
sobely = cv2.Sobel(src=img_blur, ddepth=cv2.CV_64F, dx=0, dy=1, ksize=5)
# XY轴方向的Sobel 边缘检测
sobelxy = cv2.Sobel(src=img_blur, ddepth=cv2.CV_64F, dx=1, dy=1, ksize=5)
#显示图片
cv2.imshow('Sobel X', sobelx)
cv2.waitKey(0)
cv2.imshow('Sobel Y', sobely)
cv2.waitKey(0)
cv2.imshow('Sobel X Y using Sobel() function', sobelxy)
cv2.waitKey(0)这里我们使用Sobel(src, ddepth, dx, dy)函数进行图片的边缘检测
参数src代表需要进行边缘检测的图片
参数ddepth指定输出图像的精度,而dx和dy指定每个方向的导数顺序。
例如:
如果dx=1和dy=0,我们计算 x 方向上的一阶导数 Sobel 图像。
如果同时dx=1和dy=1,我们计算两个方向的一阶导数 Sobel 图像
运行以上图片,我们可以得到图片的边缘检测图片
结果如下图所示。 x 方向的 Sobel 图像主要识别垂直边缘(即那些在 x 方向、水平方向梯度最大的边缘)。在 y 方向上标识水平边缘(即那些在 y 方向上的梯度最大的垂直边缘)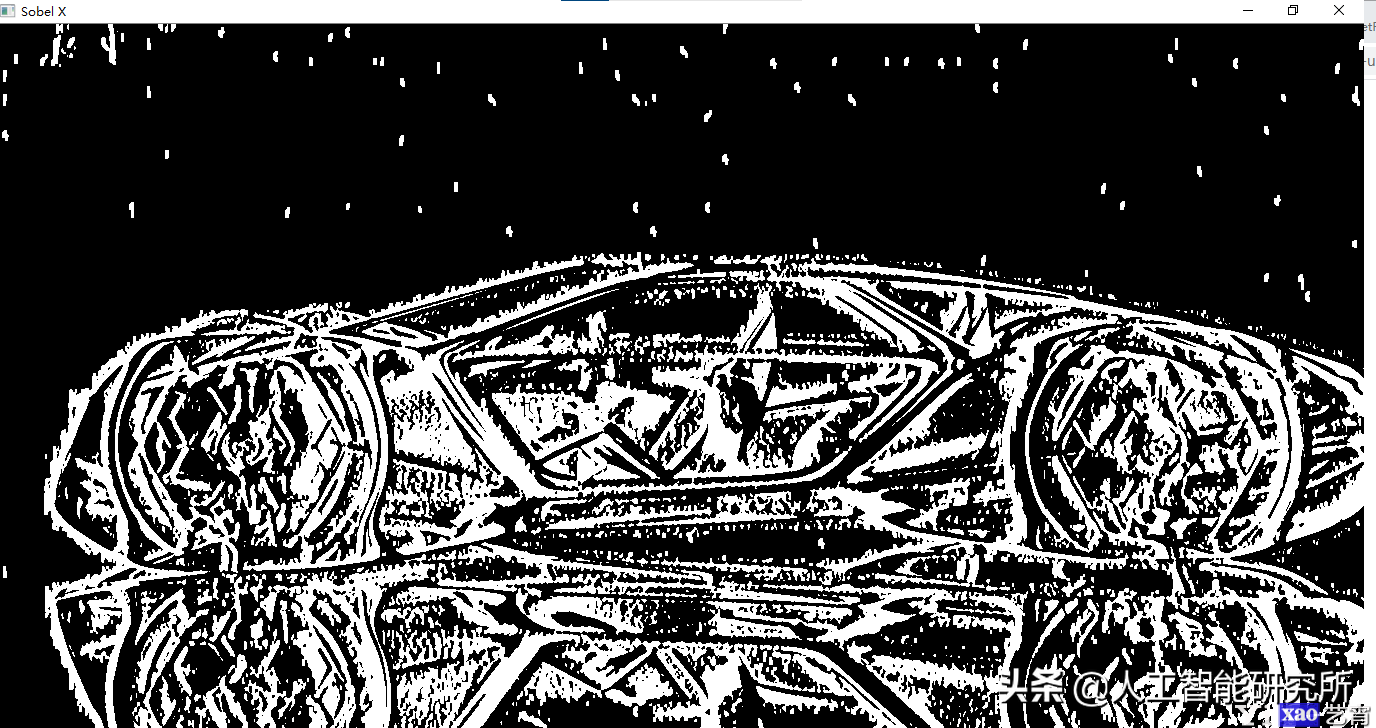
x 方向的 Sobel 图像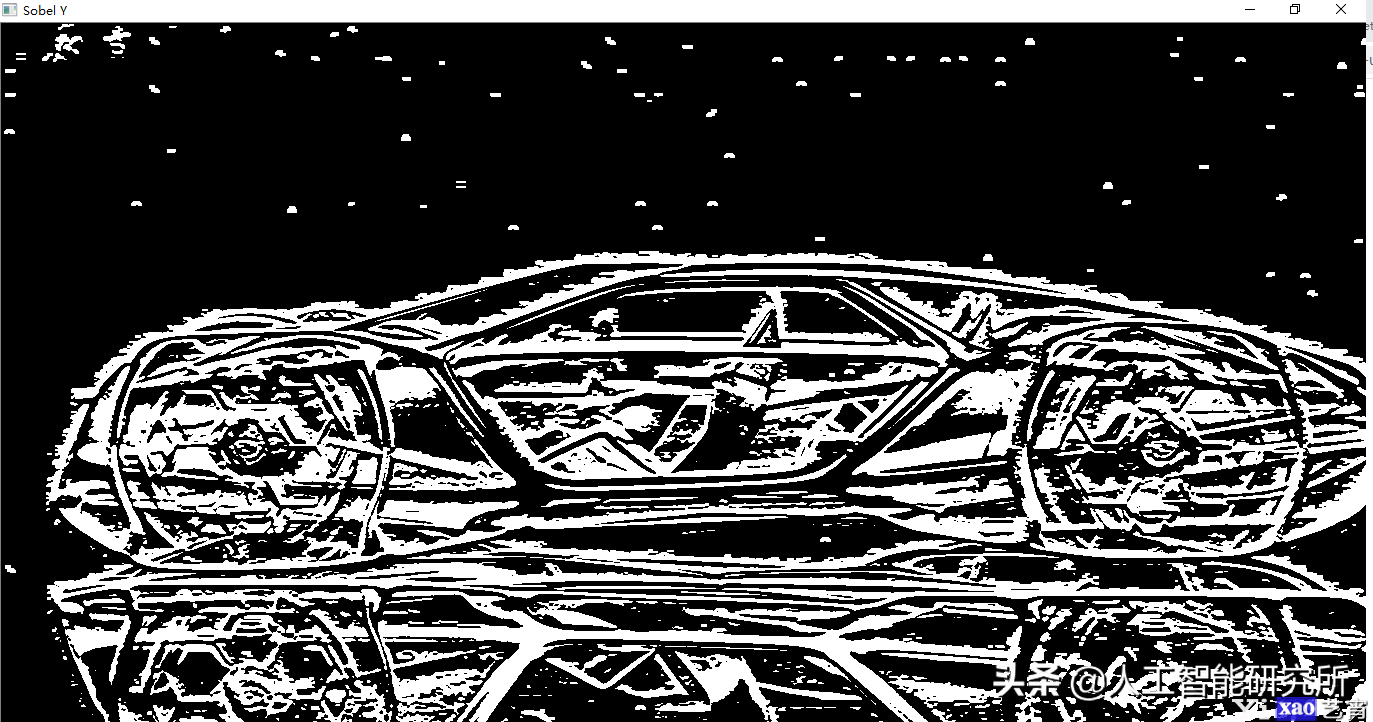
y 方向的 Sobel 图像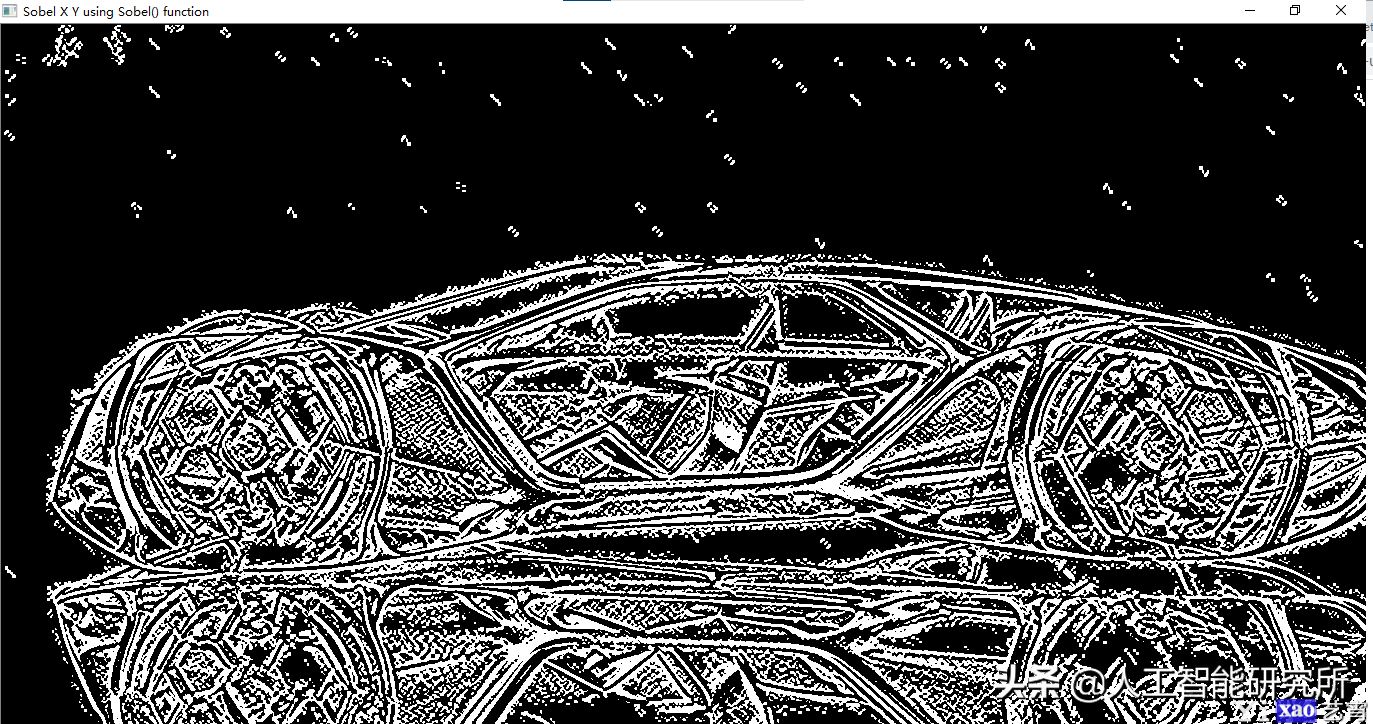
x y方向的 Sobel 图像
Canny 边缘检测
Canny 边缘检测是当今最流行的边缘检测方法之一,因为它非常强大和灵活。该算法本身遵循从图像中提取边缘的三个阶段过程。添加图像模糊,这是减少噪声的必要预处理步骤。其中主要包括:
降噪:原始图像像素通常会导致噪声边缘,因此在计算边缘之前减少噪声很重要 在 Canny 边缘检测中,高斯模糊过滤器用于从本质上去除或最小化可能导致不良边缘的不必要细节。
计算图像的强度梯度:图像平滑(模糊)后,将使用 Sobel 核心进行水平和垂直过滤。然后使用这些过滤操作的结果来计算每个像素的强度梯度
抑制假边:在降低噪声和计算强度梯度后,这一步的算法使用一种称为边缘非最大抑制的技术来过滤掉不需要的像素(实际上可能并不构成边缘)。为此,在正负梯度方向上将每个像素与其相邻的像素进行比较。如果当前像素的梯度幅度大于其相邻像素,则保持不变。否则,当前像素的大小设置为零。
滞后阈值:在 Canny 边缘检测的最后一步中,梯度幅度与两个阈值进行比较
- 如果梯度幅值高于较大的阈值,则这些像素与边缘相关联,并包含在最终的边缘图中。
- 如果梯度幅值低于较小的阈值,则像素被抑制,并从最终边缘图中排除。
- 所有其他像素,其梯度幅度落在这两个阈值之间,被标记为“弱”边缘(即它们成为包含在最终边缘图中的候选者)。
- 如果“弱”像素与边缘相关联,那么它们也包含在最终的边缘图中。
edges = cv2.Canny(image=img_blur, threshold1=100, threshold2=200)
cv2.imshow('Canny Edge Detection', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()这里opencv已经把以上几个步骤集成到了cv2.Canny一个函数里面
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]]参数解释
- image:源图像
- threshold1:阈值1
- threshold2:阈值2
- apertureSize:可选参数,Sobel算子的大小
其中,较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。函数返回的是二值图,包含检测出的边缘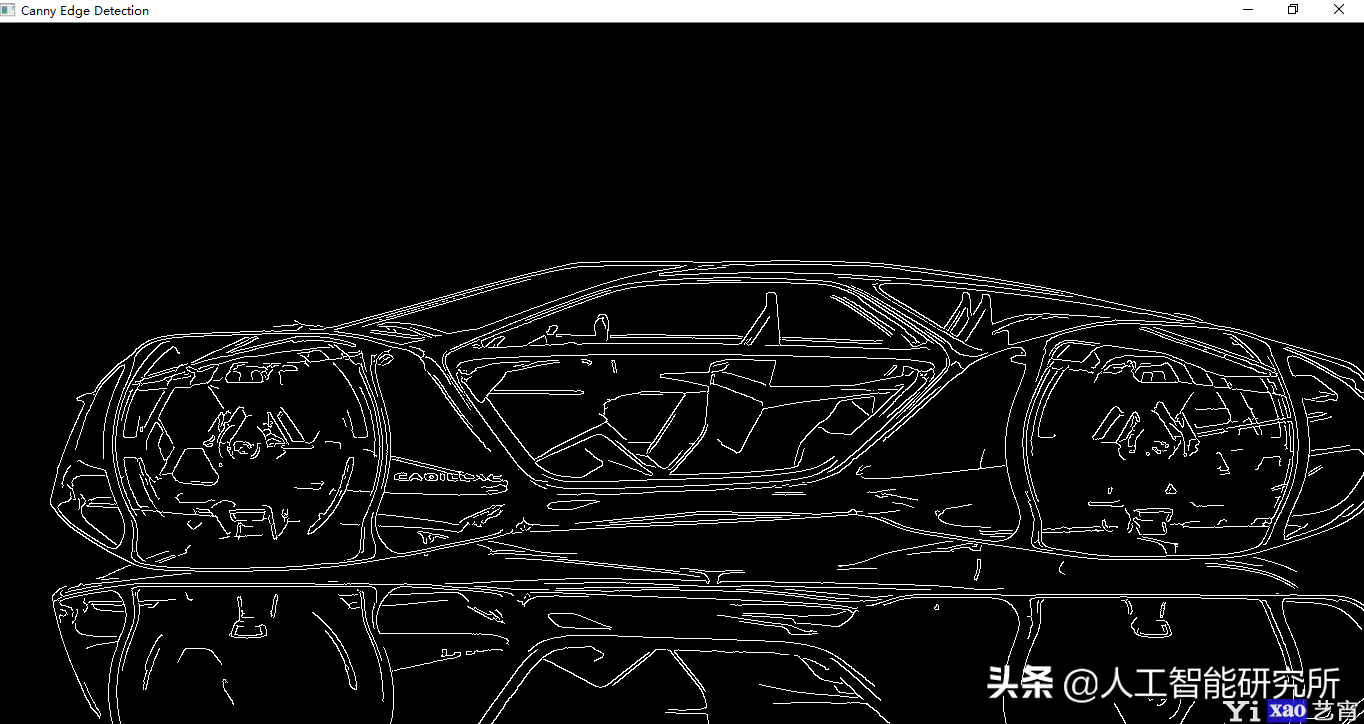
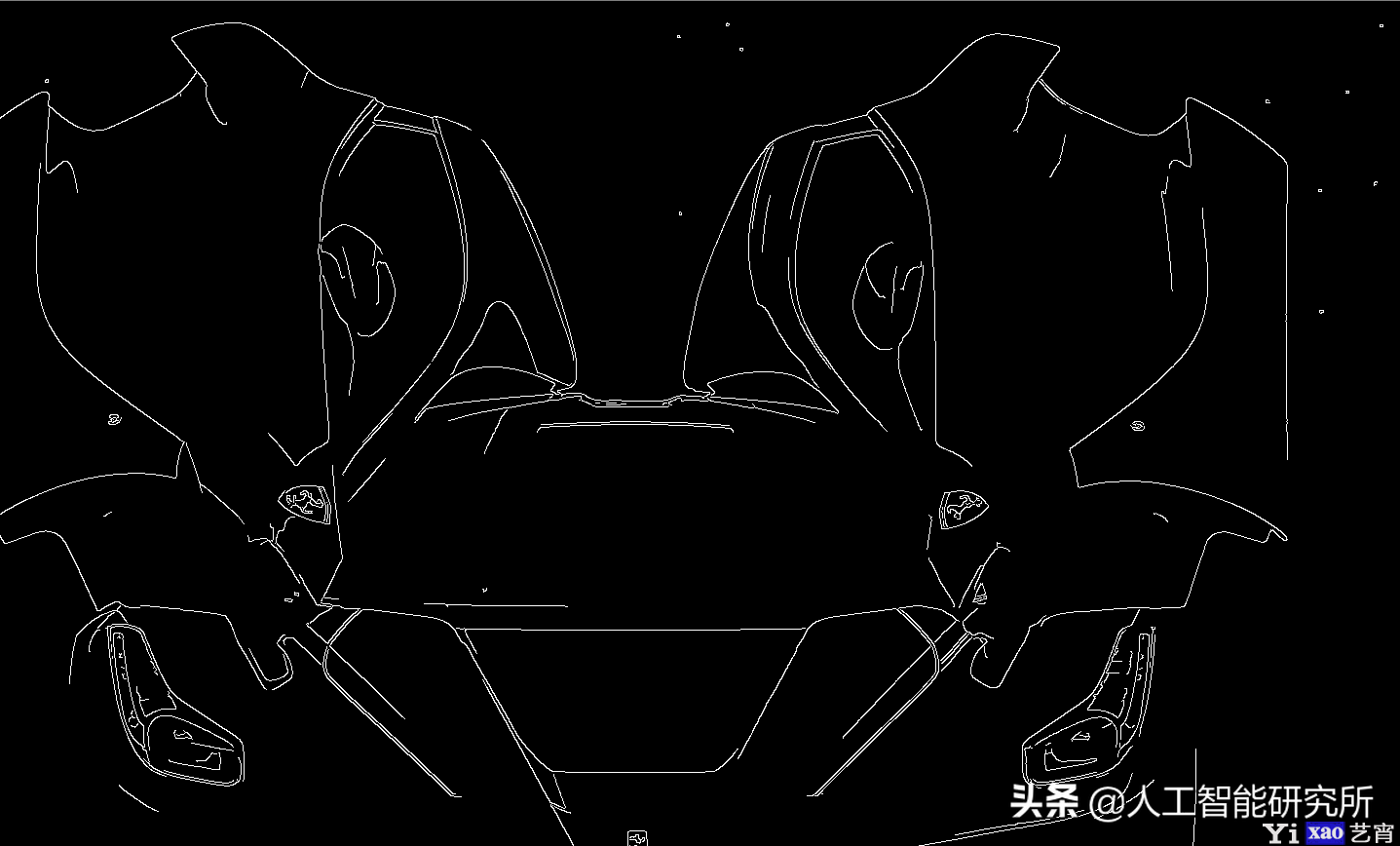
cv2.Canny边缘检测
Canny边缘检测与Sobel边缘检测算法相比,Canny边缘检测凸显出来的图片边缘更加真实
内容出处:,
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。如果您发现网站上有侵犯您的知识产权的作品,请与我们取得联系,我们会及时修改或删除。文章链接:http://www.yixao.com/tech/25104.html
 微信扫一扫
微信扫一扫
 支付宝扫一扫
支付宝扫一扫
相关推荐
-
神马搜索引擎大力发展 位居中国移动搜索第二位置
这是互联网的时代,互联网发展离不开搜索引擎。我国的搜索行业在政府的大力监管下,发展的越来越规范化,在过去的一年,搜索引擎进一步推进,而且开始和人工智能技术相结合。以前是百度搜索引擎…
-
Unix和Linux历史详解
00 前言 UNIX 与 Linux 之间的关系是一个很有意思的话题。在目前主流的服务器端操作系统中,UNIX 诞生于 20 世纪 60 年代末,Windows 诞生于 20 世纪…
-
Nginx实现负载均衡、限流、缓存、黑白名单和灰度发布
Nginx安装 注意:这里以CentOS 6.8服务器为例,以root用户身份来安装Nginx。 1.安装依赖环境 2.安装openssl 3.安装pcre 4.安装zlib 5….
-
微信群管理软件带你玩转微信群营销
随着微信营销的盛行,大部分商家或者个人最常见的营销方式就是建立微信营销群。 越来越多的微信社群出现在我们微信的聊天列表中,有良好氛围的微信社群可以让我们从中获益,但是你知道微信群内…
-
谷歌云端硬盘将整合企业和个人服务,合并桌面客户端软件
据外媒 Neowin 消息,谷歌计划将此前针对企业的云端硬盘服务和个人云端硬盘服务进行融合,以解决用户使用混乱的问题。 谷歌云端硬盘(Google Drive)目前有两个桌面版客户…
-
一步步成为优秀的后端开发工程师
学习一门编程语言 编程语言有很多种,对于刚开始进行后端开发的初学者,我建议您可以选择任何一种脚本语言开始,因为脚本语言可以解决很多实际问题,并且可以让您快速入门。如果您有一些前端知…
-
基于SpringBoot +Shiro+Redis +vue的物流管理系统
一、项目简介 基于SpringBoot +Shiro+Redis +vue的物流管理系统。 二、实现功能 用户管理 车辆管理 计划管理 仓库管理 库存管理 财务管理 统计报表 系统…
-
一个使用了阿里云VPS主机三年的站长总结出阿里云的五大特点
从2015年开始就购买了阿里云的VPS主机,虽然现在已经不再使用了,但是这几年的摸索对于阿里云的VPS也有了进一步了解。当有朋友在问我有什么比较好的VPS主机可以推荐的,如果问国内…
-
Nginx+SpringBoot实现负载均衡
负载均衡介绍 介绍 在介绍Nginx的负载均衡实现之前,先简单的说下负载均衡的分类,主要分为硬件负载均衡和软件负载均衡,硬件负载均衡是使用专门的软件和硬件相结合的设备,设备商会提供…
-
BaiduPCS-Go 使用CMD命令行全速下载百度云
大家都知道百度网盘如果不开会员就会被限速,通常我们常见的下载姿势有:PanDownload、猴油脚本等。今天老D给大家带来一个新的姿势:用CMD命令下载百度云的资源… …